LED-id on muutumas üha enam meie osaks igapäevaelu. Vahetame korteris või majas hõõglampe, autos halogeenlampe LED-lampidega. Addisoni pirni heleduse reguleerimiseks kasutatakse tavaliselt dimmerit - see on asi, millega saate vahelduvvoolu piirata, muutes seeläbi hõõgumise heleduse vajalikuks. Miks maksta rohkem ja isegi tunda ebamugavustunne liiga ereda valguse tõttu? Võimsusregulaatorit saab üldiselt kasutada paljudel tarbijatel (jootekolb, veski, tolmuimeja, puur...) vahelduvvõrgupingest need on tavaliselt ehitatud triaki baasil.
LED-id toidavad alalis- ja stabiliseeritud voolu, seega ei saa siin kasutada tavalist hämardit. Kui muudate lihtsalt sellele antud pinget, muutub heledus väga järsult, vool on nende jaoks oluline, kuid vooluregulaatori asemel teeme midagi muud, nimelt PWM (Pulse Wide Modulator), see lülitab toite välja. LED-ilt teatud aja jooksul heledus väheneb, kuid me ei märka vilkumist, kuna sagedus on selline, et inimsilm seda ei märka. Mikrokontrollereid siin ei kasutata, sest nende olemasolu võib saada takistuseks seadme kokkupanemisel, peab olema programmeerija, teatud tarkvara... Seetõttu kasutatakse selles lihtsas vooluringis vaid lihtsaid ja avalikult kättesaadavaid raadiokomponente.
Sellist asja saab kasutada igasuguste inertsiaalsete ehk energiat salvestavate koormuste puhul, sest kui näiteks alalisvoolumootori toiteallikast lahti ühendada, siis see ei lakka kohe pöörlemast.
Ahela võib minu arvates jämedalt jagada kaheks osaks, nimelt megapopulaarsel taimeril NE555 tehtud generaatoriks (analoog -KR1006VI1) ja võimsaks avamis/sulgemise transistoriks, mille abil antakse koormusele toide. (siin töötab 555 stabiilses multivibraatoris). Kasutame võimsat bipolaarset transistori NPN struktuuri (võtsin TIP122), kuid seda on võimalik asendada väljatransistoriga (MOSFET). Impulsside generaatori sageduse, perioodi ja impulsi kestuse määravad kaks takistit (R3, R2) ja kondensaatorit (C1, C2) ning seda saame muuta takistuse reguleerimisega takistiga.
Vooluahela komponendid
555 analoogtaimeri arvutamiseks on palju programme, saate katsetada generaatori sagedust mõjutavate komponentide väärtustega - kõike seda saab hõlpsasti arvutada paljude programmide, näiteks selle abil. Saate nimiväärtusi veidi muuta, kõik toimib nii nagu on. Impulssdioodid 4148 saab hõlpsasti asendada kodumaiste KD222-ga. Kondensaatorid 0,1 µF ja 0,01 µF keraamilised ketaskondensaatorid. Heaks ja sujuvaks reguleerimiseks seadsime sageduse muutuva takistiga, selle maksimaalne takistus on 50 kOhm.
Kõik on kokku pandud diskreetsetele elementidele, plaadi mõõtmed on 50-25 mm.
Kuidas skeem töötab?
Seade töötab lülitina kahe režiimi vahel: voolu antakse koormusele Ja koormusele ei anta voolu. Lülitumine toimub nii kiiresti, et meie silmad ei näe seda vilkumist. Niisiis, see seade reguleerib võimsust, muutes intervalli toite tarnimise ja väljalülitamise vahel. Arvan, et mõistate PWM-i olemust. Ostsilloskoobi ekraanil näeb see välja selline.
Esimesel pildil on nõrk kuma, sest perioodil T hõivab impulsi pikkus t1 vaid 20% (see on nn töötsükkel) ja ülejäänud 80% on loogiline 0 (pinget pole).
Teisel pildil on meile signaal, mida nimetatakse ruutlaineks, siis on meil t1=0,5*T ehk töötsükkel ja koefitsient. Täidis on 50%.
Kolmandal juhul on meil D=90%. LED põleb peaaegu täis heledusega.
Kujutame ette, et T=1 sekund, siis esimesel juhul
§ 1) valgusdioodile voolab vool 0,2 s, kuid mitte 0,8 s
§ 2)0,5s voolu toide 0,5s nr
Muide, olles teinud kolm PWM-regulaatorite plaati vastavalt vooluringile ja ühendanud need ühega RGB lint Võimalik on seada soovitud valgusvahemik. Iga plaat juhib oma LED-e (punane, roheline ja sinine) ja segab need sisse teatud järjestus saavutate soovitud sära.
Millised energiakadud sellel seadmel on?
Esiteks on need paar milliamprit, mis tarbivad mikroskeemi impulssgeneraatorit, ja seejärel on võimsustransistor, mis hajutab võimsust ligikaudu P=0,6V*I tarbimiskoormus . Baastakisti võib tähelepanuta jätta. Üldiselt on PWM-i kaod minimaalsed, kuna impulsi laiuse juhtimissüsteem on väga tõhus, kuna raisatakse väga vähe energiat (ja seetõttu tekib vähe soojust).
Alumine rida
Selle tulemusena saime ilusa ja lihtsa PWM-i. Väga mugavaks osutus neil enda jaoks mõnusat sära intensiivsust reguleerida. Selline seade on igapäevaelus alati kasulik.
- Edasi >
LED-e kasutatakse peaaegu kogu meid ümbritsevas tehnoloogias. Tõsi, mõnikord on vaja nende heledust reguleerida (näiteks taskulampides või monitorides). Lihtsaim väljapääs selles olukorras näib olevat LED-i läbiva vooluhulga muutmine. Aga see pole tõsi. LED on üsna tundlik komponent. Voolutugevuse pidev muutmine võib selle eluiga oluliselt lühendada või isegi katkestada. Samuti on vaja arvestada, et piiravat takistit ei saa kasutada, kuna sellesse koguneb liigne energia. See on patareide kasutamisel vastuvõetamatu. Selle lähenemisviisi teine probleem on see, et valguse värvus muutub.
On kaks võimalust.
- PWM regulatsioon
- Analoog
Need meetodid juhivad LED-i läbivat voolu, kuid nende vahel on teatud erinevusi.
Analoogjuhtimine muudab LED-e läbiva voolu taset. Ja PWM reguleerib vooluvarustuse sagedust.
PWM regulatsioon
Sellest olukorrast väljapääs võib olla impulsi laiuse modulatsiooni (PWM) kasutamine. Selle süsteemiga saavad LED-id vajaliku voolu ja heledust reguleeritakse kõrgsagedusliku toiteallika abil. See tähendab, et söötmisperioodi sagedus muudab LED-ide heledust.
PWM-süsteemi vaieldamatu eelis on LED-i tootlikkuse säilitamine. Tõhusus on umbes 90%.
PWM reguleerimise tüübid
- Kahejuhtmeline. Sageli kasutatakse autode valgustussüsteemides. Konverteri toiteallikas peab olema vooluahel, mis genereerib alalisvoolu väljundis PWM-signaali.
- Šundiseade. Konverteri sisse-/väljalülitamiseks kasutage šundikomponenti, mis pakub väljundvoolule muud teed kui LED.
PWM-i impulsi parameetrid
Impulsi kordussagedus ei muutu, seega ei esitata sellele valguse heleduse määramisel nõudeid. Sel juhul muutub ainult positiivse impulsi laius või aeg.

Pulsisagedus
Isegi kui võtta arvesse asjaolu, et sageduse osas pole erilisi kaebusi, on piirväärtused olemas. Need on määratud inimese silma tundlikkusega virvenduse suhtes. Näiteks filmis peavad kaadrid vilkuma kiirusega 24 kaadrit sekundis, et meie silmad seda ühe liikuva pildina tajuksid.
Selleks, et värelevat valgust tajutaks ühtlase valgusena, peab sagedus olema vähemalt 200 Hz. Ülemistel näitajatel pole piiranguid, kuid madalamal pole ka võimalust.
Kuidas PWM-regulaator töötab?
Valgusdioodide otseseks juhtimiseks kasutatakse transistori võtmeetappi. Tavaliselt kasutavad nad transistore, mis võivad koguda suurel hulgal võimsust.
See on vajalik LED-ribade või suure võimsusega LED-ide kasutamisel.
Väikeste koguste või väikese võimsuse korral piisab bipolaarsete transistoride kasutamisest. LED-e saab ühendada ka otse mikroskeemidega.
PWM generaatorid
PWM-süsteemis saab peaostsillaatorina kasutada mikrokontrollerit või ahelatest koosnevat vooluringi väike kraad integratsiooni.
Samuti on võimalik luua regulaator mikroskeemidest, mis on mõeldud toiteallikate ümberlülitamiseks või K561 loogikakiipidest või NE565 integreeritud taimerist.
Nendel eesmärkidel kasutavad käsitöölised isegi operatsioonivõimendit. Selleks on sellele monteeritud generaator, mida saab reguleerida.
Üks enim kasutatud vooluringe põhineb 555 taimeril. Põhimõtteliselt on see tavaline ostsillaator ristkülikukujulised impulsid. Sagedust reguleerib kondensaator C1. väljundis peaks kondensaatoril olema kõrgepinge(see on sama ka positiivse toiteallikaga ühendamisel). Ja see laeb, kui väljundis on madal pinge. See hetk tekitab erineva laiusega impulsse.
Teine populaarne vooluahel on UC3843 kiibil põhinev PWM. sel juhul on lülitusahelat muudetud lihtsustamise suunas. Impulsi laiuse reguleerimiseks kasutatakse positiivse polaarsusega juhtpinget. Sel juhul toodab väljund soovitud PWM-impulsssignaali.
Reguleerimispinge mõjub väljundile järgmiselt: vähenedes laius suureneb.

Miks PWM?
- Selle süsteemi peamine eelis on selle lihtsus. Kasutusmustrid on väga lihtsad ja hõlpsasti rakendatavad.
- PWM-juhtimissüsteem pakub väga laia valikut heleduse reguleerimist. Kui me räägime monitoridest, siis on võimalik kasutada CCFL-taustvalgustust, kuid sel juhul saab heledust ainult poole võrra vähendada, kuna CCFL-taustvalgus on voolu ja pinge suhtes väga nõudlik.
- PWM-i abil saate hoida voolu konstantsel tasemel, mis tähendab, et LED-id ei kahjustata ja värvitemperatuur ei muutu.
PWM-i kasutamise puudused
- Aja jooksul võib pildi värelemine muutuda üsna märgatavaks, eriti madala heleduse või silmade liikumise korral.
- Pideva ereda valguse (näiteks päikesevalguse) korral võib pilt muutuda uduseks.
Kiip NCP1014 on fikseeritud konversioonisageduse ja sisseehitatud kõrgepingelülitiga PWM-kontroller. Täiendavad sisemised plokid, mis on rakendatud mikrolülituse osana (vt joonis 1), võimaldavad sellel pakkuda kaasaegsetele toiteallikatele kõiki funktsionaalseid nõudeid.
Riis. 1.
Seeria kontrollerid NCP101X neid käsitleti üksikasjalikult Konstantin Staroverovi artiklis ajakirja 2010. aasta 3. numbris, seetõttu piirdume artiklis ainult kaalumisega põhiomadused NCP1014 mikroskeeme ja keskendume võrdlusprojektis esitatud IP arvutus- ja töömehhanismi omaduste kaalumisele.
NCP1014 kontrolleri omadused
- Integreeritud 700 V MOSFET väljundtransistor madala kanali takistusega (11 oomi);
- pakkudes draiveri väljundvoolu kuni 450mA;
- võime töötada mitmel fikseeritud muundussagedusel - 65 ja 100 kHz;
- teisendussagedus varieerub ±3...6% piires võrreldes selle eelseadistatud väärtusega, mis võimaldab "hägustada" kiirgavate häirete võimsust teatud sagedusvahemikus ja seeläbi vähendada EMI taset;
- sisseehitatud kõrgepinge toitesüsteem on võimeline tagama mikrolülituse töö ilma kolmanda abimähisega trafo kasutamata, mis lihtsustab oluliselt trafo mähist. See funktsioon tootja poolt määratud DSS ( Dünaamiline isevarustus— autonoomne dünaamiline toiteallikas), kuid selle kasutamine piirab IP väljundvõimsust;
- võime töötada maksimaalse efektiivsusega madalatel koormusvooludel tänu PWM-impulsside edastusrežiimile, mis võimaldab madalat tühivõimsust - mitte rohkem kui 100 mW, kui mikrolülitust toidetakse trafo kolmandast abimähisest;
- üleminek impulsi vahelejätmise režiimile toimub siis, kui koormusvoolutarve väheneb nimiväärtusest väärtuseni 0,25, mis välistab akustilise müra tekitamise probleemi isegi odavate impulsstrafode kasutamisel;
- rakendatud pehme käivitamise funktsioon (1ms);
- järeldus tagasisidet pinge on otse ühendatud optroni väljundiga;
- Rakendatud on lühisekaitsesüsteem, mis naaseb pärast selle kõrvaldamist normaalsesse töösse. Funktsioon võimaldab jälgida nii koormuse otsest lühist kui ka lahtisidestava optroni kahjustamise korral avatud tagasisideahelaga olukorda;
- sisseehitatud ülekuumenemise kaitsemehhanism.
Kontroller NCP1014 on saadaval kolme tüüpi pakettidena – SOT-223, PDIP-7 ja PDIP-7 GULLWING (vt joonis 2) koos joonisel fig. 3. Uusim pakett on PDIP-7 paketi eriversioon, millel on spetsiaalne tihvtliistud, mistõttu sobib see pinnale paigaldamiseks.

Riis. 2.

Riis. 3.
NCP1014 kontrolleri tüüpiline rakendusskeem tagasilennul ( Tagasilend) muundur on näidatud joonisel 4.

Riis. 4.
NCP1014 kontrolleril põhinev IP arvutusmeetod
Vaatleme NCP1014-l põhineva tagasilöögimuunduri samm-sammult arvutamise meetodit, kasutades kuni 5 W väljundvõimsusega toiteallika etalonprojekti näidet kolme järjestikku ühendatud LED-i süsteemi toiteks. Valgusdioodideks loetakse ühevatised valged LED-id, mille normaliseerimisvool on 350 mA ja pingelangus 3,9 V.
Esimene samm on välja töötatud IP sisendi, väljundi ja võimsuse karakteristikute kindlaksmääramine:
- sisendpinge vahemik - Vac(min) = 85V, Vac(max) = 265V;
- väljundparameetrid - Vout = 3x3,9V ≈ 11,75V, Iout = 350mA;
- väljundvõimsus – Pout = VoutхIout = 11,75 Vх0,35 A ≈ 4,1 W
- sisendvõimsus – pin = Pout/h, kus h on hinnanguline efektiivsus = 78%
Pin = 4,1 W/0,78 = 5,25 W
- Alalisvoolu sisendpinge vahemik
Vdc (min) = Vdc (min) x 1,41 = 85 x 1,41 = 120 V (alalisvool)
Vdc (max) = Vdc (max) x 1,41 = 265 x 1,41 = 375 V (alalisvool)
- keskmine sisendvool - Iin(avg) = Pin / Vdc(min) ≈ 5,25/120 ≈ 44mA
- tipp sisendvool - Ipeak = 5xIin(avg) ≈ 220 mA.
Esimene sisendlink on kaitsme ja EMI-filter ning nende valik on teine samm IP kujundamisel. Kaitsme valimisel tuleb lähtuda katkestusvoolu väärtusest ja esitatud konstruktsioonis on valitud kaitse, mille voolutugevus on 2 A. Arvutusprotseduuri ei süvene sisendfilter, kuid pange tähele, et ühisrežiimi ja diferentsiaalmüra summutamise aste sõltub suuresti topoloogiast trükkplaat, samuti filtri lähedust toitepistikule.
Kolmas samm on parameetrite arvutamine ja dioodsilla valik. Siin on peamised parameetrid:
- lubatud vastupidine (blokeeriv) dioodi pinge - VR ≥ Vdc(max) = 375V;
- edasisuunav dioodi vool - IF ≥ 1,5xIin(avg) = 1,5x0,044 = 66mA;
- lubatud ülekoormusvool ( liigvool), mis võib ulatuda viiekordse keskmise vooluni:
IFSM ≥ 5 x IF = 5 x 0,066 = 330 mA.
Neljas samm on dioodisilla väljundisse paigaldatud sisendkondensaatori parameetrite arvutamine. Sisendkondensaatori suuruse määrab alaldatud sisendpinge tippväärtus ja sisendi pulsatsiooni määratud tase. Suurem sisendkondensaator tagab madalama pulsatsiooniväärtuse, kuid suurendab toiteallika sisselülitusvoolu. Üldiselt määratakse kondensaatori mahtuvus järgmise valemiga:
Cin = Pin/, kus
fac on vahelduvvoolu sagedus (60 Hz vaadeldava disaini puhul);
DV on lubatud pulsatsioonitase (meie puhul 20% Vdc-st(min).
Cin = 5,25/ = 17 uF.
Meie puhul valime alumiiniumist elektrolüütkondensaatori, mille võimsus on 33 μF.
Viies ja peamine samm on mähise toote - impulsstrafo arvutamine. Trafo arvutamine on kogu toiteallika arvutamise kõige keerulisem, olulisem ja “peenem” osa. Trafo põhifunktsioonid tagasilöögimuunduris on energia kogunemine, kui juhtlüliti on suletud ja vool voolab läbi selle primaarmähise, ning seejärel selle edastamine sekundaarmähisele, kui vooluahela primaarosa toide on välja lülitatud. .
Võttes arvesse esimeses etapis arvutatud toiteallika sisend- ja väljundomadusi, samuti nõudeid toiteallika töö tagamiseks trafo pidevvoolurežiimis, on täiteteguri maksimaalne väärtus ( töötsükkel) võrdub 48%. Selle täiteteguri väärtuse põhjal teeme kõik trafo arvutused. Võtame kokku põhiparameetrite arvutatud ja täpsustatud väärtused:
- kontrolleri töösagedus fop= 100 kHz
- täitmistegur dmax= 48%
- minimaalne sisendpinge Vin(min) = Vdc(min) - 20% = 96V
- väljundvõimsus Pout= 4,1W
- hinnanguline tõhususe väärtush = 78%
- sisendvoolu tippväärtus Ipeak= 220mA
Nüüd saame arvutada trafo primaarmähise induktiivsuse:
Lpri = Vin(min) x dmax/(Ipiik x fop) = 2,09 mH
Mähiste keerdude arvu suhe määratakse võrrandiga:
Npri/Nsec = Vdc(min) x dmax/(Vout + V F x (1 – dmax)) ≈ 7
Peame vaid kontrollima trafo võimet vajalikku väljundvõimsust enda kaudu “pumbata”. Seda saab teha järgmise võrrandi abil:
Pin(tuum) = Lpri x I 2 tipp x fop/2 ≥ Pout
Pin (südamik) = 2,09 mH x 0,22 2 x 100 kHz/2 = 5,05 W ≥ 4,1 W.
Tulemustest järeldub, et meie trafo suudab vajaliku võimsuse pumbata.
Võib märkida, et siin ei ole me andnud täielikku trafo parameetrite arvutust, vaid oleme määranud ainult selle induktiivsed omadused ja näidanud valitud lahenduse piisavat võimsust. Trafode arvutamisest on kirjutatud palju töid ning lugejale huvipakkuvad arvutusmeetodid leiab näiteks või. Nende tehnikate käsitlemine ei kuulu käesoleva artikli ulatusse.
Toiteallika elektriahel, mis vastab tehtud arvutustele, on toodud joonisel 5.

Riis. 5.
Nüüd on aeg tutvuda ülaltoodud lahenduse omadustega, mille arvutamist ülalpool ei toodud, kuid millel on suur väärtus meie IP toimimiseks ja kontrolleri NCP1014 rakendatud kaitsemehhanismide rakendusfunktsioonide mõistmiseks.
IP-d rakendava ahela töö omadused
Ahela sekundaarne osa koosneb kahest põhiplokist - plokist voolu edastamiseks koormusele ja toiteallikast tagasisideahela jaoks.
Kui juhtlüliti on suletud (otserežiim), töötab tagasisideahela toiteahel, mis on realiseeritud dioodil D6, voolureguleerimistakistil R3, kondensaatoril C5 ja zeneri dioodil D7, mis koos dioodiga D8 seab vajaliku toitepinge ( 5,1 V) optroni ja šundi regulaatori IC3 .
Tagurpidikäigu ajal kantakse trafos salvestatud energia dioodi D10 kaudu koormusele. Samal ajal laetakse salvestuskondensaatorit C6, mis tasandab väljundi pulsatsiooni ja annab koormusele pideva toitepinge. Koormusvool seatakse takistiga R6 ja seda juhib šundiregulaator IC3.
IP-l on kaitse koormuse lahtiühendamise ja koormuse lühise eest. Lühisekaitset pakub šundiregulaator TLV431, mille põhiroll on OS-i ahela regulaator. Lühis tekib kõigi koormuse LED-ide lühise rikke korral (kui üks või kaks LED-i ebaõnnestuvad, võtavad nende funktsioonid üle paralleelsed zeneri dioodid D11...D13). Takisti R6 väärtus valitakse nii, et töökoormuse voolul (meie puhul 350 mA) on selle pingelang alla 1,25 V. Lühise korral suureneb vool läbi R6 järsult, mis viib šundi IC3 avamine ja optroni IC2 ja jõudude kontrolleri NCP1014 aktiveerimine vähendavad väljundpinget.
Koormuse lahtiühendamise vastane kaitsemehhanism põhineb zeneri dioodi D9 ühendamisel paralleelselt koormusega. Kui koormusahel avaneb ja selle tagajärjel tõuseb toiteallika väljundpinge 47 V-ni, avaneb zeneri diood D9. See lülitab optroni sisse ja sunnib kontrollerit väljundpinget vähendama.
Kas soovite NCP1014-ga isiklikult kohtuda? - Pole probleemi!
Neile, kes soovivad enne NCP1014 baasil oma IP arendamist veenduda, et tegemist on tõeliselt lihtsa, töökindla ja tõhusa lahendusega, toodab ONSemiconductor mitut tüüpi hindamisplaate (vt tabel 1, joonis 6; saadaval tellimiseks COMPELi kaudu).
Tabel 1. Hindamiskomisjonide läbivaatamine
| Tellimuse kood | Nimi | Lühikirjeldus |
|---|---|---|
| NCP1014LEDGTGEVB | 8W LED-draiver 0,8 võimsusteguriga | Tahvel on loodud demonstreerima võimalust ehitada LED-draiver võimsusteguriga > 0,7 (Energy Stari standard) ilma täiendavat PFC-kiipi kasutamata. 8 W väljundvõimsus muudab selle lahenduse ideaalseks selliste struktuuride nagu Cree XLAMP MC-E toiteks, mis sisaldavad ühes pakendis järjestikku nelja LED-i. |
| NCP1014STBUCGEVB | Mitte-inverteeriv buck-muundur | Tahvel on tõestuseks väitele, et NCP1014 kontrollerist piisab madala hinnaga toiteallikate ehitamiseks karmides töötingimustes. |

Riis. 6.
Lisaks on lisaks artiklis käsitletule veel mitu näidet erinevate IP-de valmiskujunduste kohta. See on 5 W AC/DC adapter mobiiltelefonidele ja teine IP-valik LED-i jaoks, samuti suur hulk artikleid kontrolleri NCP1014 kasutamise kohta, mille leiate ettevõtte ONSemiconductor ametlikult veebisaidilt - http://www.onsemi.com/.
Ettevõte COMPEL on ONSemiconductori ametlik edasimüüja ja seega ka meie veebisaidil saate alati leida teavet ONS-i toodetud kiipide saadavuse ja maksumuse kohta ning tellida ka prototüüpe, sealhulgas NCP1014.
Järeldus
ONS-i toodetud kontrolleri NCP1014 kasutamine võimaldab teil välja töötada ülitõhusad AC/DC muundurid, et varustada koormusi stabiliseeritud vooluga. Kontrolleri võtmevõimaluste nõuetekohane kasutamine võimaldab minimaalse arvu täiendavate elektrooniliste komponentidega tagada lõpliku toiteallika ohutu töö koormuse avatud või lühise tingimustes.
Kirjandus
1. Konstantin Staroverov “NCP101X/102X kontrollerite kasutamine keskmise võimsusega võrgu toiteallikate väljatöötamisel”, ajakiri Electronics News, nr 3, 2010, lk. 7-10.
4. Mack Raymond. Lülitavad toiteallikad. Teoreetilised alused disain ja juhised praktiliseks rakendamiseks/Trans. inglise keelest Pryanichnikova S.V., M.: Kirjastus "Dodeka-XXI", 2008, - 272 lk.: ill.
5. Vdovin S.S. Impulsstrafode projekteerimine, L.: Energoatomizdat, 1991, - 208 lk.: ill.
6. TND329-D. "5W mobiiltelefoni CCCV AC-DC Adepter"/ http://www.onsemi.com/pub_link/Collateral/TND329-D.PDF.
7. TND371-D. "Võrguühenduseta LED-draiver, mis on ette nähtud ENERGY STARi jaoks"/ http://www.onsemi.com/pub_link/Collateral/TND371-D.PDF.
Tehnilise info hankimine, näidiste tellimine, kohaletoimetamine - e-post:

NCP4589 - LDO regulaator
automaatse energiasäästuga
NCP4589 - uus 300 mA CMOS LDO regulaator alates ON Pooljuht. NCP4589 lülitub väikese voolukoormuse korral madala tarbimise režiimile ja lülitub automaatselt tagasi "kiirele" režiimile, kui väljundkoormus ületab 3 mA.
NCP4589 saab seadistada püsirežiimile kiire töö sundrežiimi valiku kaudu (juhtimine spetsiaalse sisendi kaudu).
NCP4589 peamised omadused:
- Töösisendpinge vahemik: 1,4…5,25V
- Väljundpinge vahemik: 0,8…4,0 V (0,1 V sammud)
- Sisendvool kolmes režiimis:
- Minimaalne pingelang: 230mV I OUT juures = 300mA, V OUT = 2,8V
- Kõrgepinge pulsatsiooni summutamise suhe: 70 dB sagedusel 1 kHz (kiirrežiimis).
Madala tarbimise režiim – 1,0 µA V OUT juures< 1,85 В
Kiire režiim - 55 µA
Energiasäästurežiim - 0,1 µA
NCP4620 – laia sisendpingevahemikuga LDO regulaator
NCP4620 - See on CMOS LDO regulaator voolule 150 mA alates ON Pooljuht sisendpinge vahemikus 2,6 kuni 10 V. Seadmel on kõrge väljundtäpsus - umbes 1% - madala temperatuuri koefitsiendiga ±80 ppm/°C.
NCP4620-l on ülekuumenemiskaitse ja lubamissisend ning see on saadaval standard- ja automaatse tühjenemisega versioonis.
NCP4620 peamised omadused:
- Töösisendpinge vahemik 2,6 kuni 10 V (max 12 V)
- Fikseeritud väljundpinge vahemik 1,2 kuni 6,0 V (100 mV sammuga)
- Minimaalne edasimineku pingelang - 165 mV (100 mA juures)
- Võimsuse pulsatsiooni summutamine - 70dB
- Mikrolülituse toite väljalülitamine, kui see kuumeneb üle 165°C
Selles artiklis esitatud lihtsaimat LED-heleduse juhtimisahelat saab edukalt kasutada auto häälestamisel või lihtsalt autos öise mugavuse suurendamiseks, näiteks armatuurlaua, kindalaeka jms valgustamiseks. Selle toote kokkupanemiseks ei vaja te tehnilisi teadmisi, peate lihtsalt olema ettevaatlik ja ettevaatlik.
Pinge 12 volti peetakse inimestele täiesti ohutuks. Kui kasutate seda oma töös LED riba, siis võime eeldada, et te ei kannata tulekahju, kuna lint praktiliselt ei kuumene ega saa ülekuumenemisest süttida. Kuid töö täpsus on vajalik, et vältida paigaldatud seadmes lühist ja selle tagajärjel tulekahju ning seega oma vara säilitada.
Transistor T1 suudab olenevalt kaubamärgist reguleerida kuni 100 vatti koguvõimsusega LED-ide heledust eeldusel, et see on paigaldatud vastava ala jahutusradiaatorile.
Transistori T1 tööd saab võrrelda tavalise veekraani ja potentsiomeetri R1 käepidemega. Mida rohkem lahti keerate, seda rohkem vett voolab. Nii see siin on. Mida rohkem potentsiomeetrit lahti keerate, seda rohkem voolu läheb. Kui seda pingutada, lekivad LED-id vähem ja LED-id säravad vähem.
Regulaatori ahel
Selle skeemi jaoks ei vaja me palju osi.Transistor T1. KT819 saate kasutada mis tahes tähega. KT729. 2N5490. 2N6129. 2N6288. 2SD1761. BD293. BD663. BD705. BD709. BD953. Need transistorid tuleb valida sõltuvalt sellest, kui palju LED-võimsust kavatsete reguleerida. Sõltuvalt transistori võimsusest sõltub ka selle hind.
Potentsiomeeter R1 võib olla mis tahes tüüpi takistusega kolm kuni kakskümmend kilo. Kolme kilooomine potentsiomeeter vähendab LED-ide heledust vaid veidi. Kümme kilooomi vähendab selle peaaegu nullini. Kakskümmend – reguleeritakse skaala keskelt. Valige, mis teile kõige paremini sobib.
Kui kasutate LED-riba, siis ei pea te vaeva nägema summutustakistuse (skeemil R2 ja R3) arvutamisega valemite abil, sest need takistused on juba valmistamisel riba sisse ehitatud ja teil on vaja ainult ühendada see pingele 12 volti. Peate lihtsalt ostma spetsiaalselt 12-voldise lindi. Kui ühendate lindi, välistage takistused R2 ja R3.
Nad väljastavad sama LED sõlmed, mis on mõeldud 12-voldise toiteallika jaoks, ja LED-pirnid autodele. Kõikides nendes seadmetes on tootmise käigus sisseehitatud summutustakistid või toitedraiverid, mis on otse ühendatud masina pardavõrku. Kui teete alles esimesi samme elektroonikas, siis on parem kasutada just selliseid seadmeid.
Niisiis, oleme otsustanud vooluringi komponentide üle, on aeg alustada kokkupanekut.

Transistori kruvime läbi soojust juhtiva isoleeriva tihendi jahutusradiaatori poldi külge (et radiaatori ja sõiduki pardavõrgu vahel ei oleks elektrikontakti, et vältida lühist).

Lõika traat vajaliku pikkusega tükkideks.

Ribame isolatsiooni ja tinatame tinaga.

Puhastage LED-riba kontaktid.

Jootke juhtmed lindile.

Katmata kontakte kaitseme liimipüstoliga.

Jootme juhtmed transistori külge ja isoleerime termokahaneva korpusega.

Jootme juhtmed potentsiomeetri külge ja isoleerime termokahaneva korpusega.
PWM-heleduse kontroller MK ATmega8-l, akutoitel ja laadimisnäidik.
Artikkel on mõeldud inimestele, kellel on mõningad teadmised raadioelektroonikast, nimelt:
- mis on mikrokontroller ja kuidas seda vilkuda,
- mis on PWM-regulatsioon,
- mis on led juht.
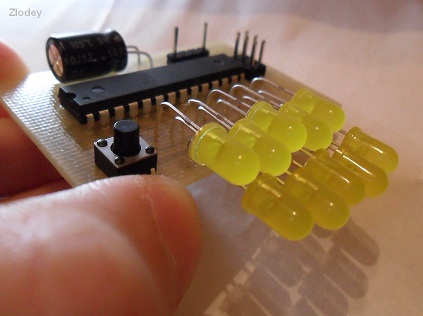
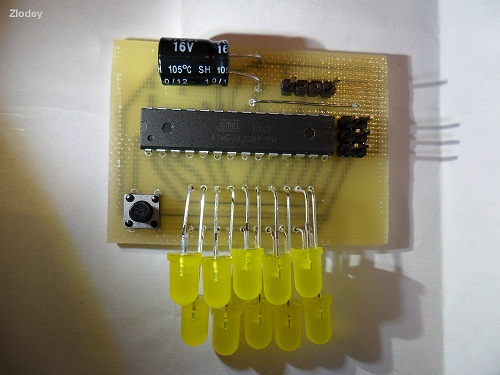
Projekt oli mõeldud jalgrattale paigaldamiseks. Kuidas see kõik algas. Võtsime sõpradega sageli osa öistest rattasõitudest, nii et vajasime rattale esituld. Noh, ma ei tahtnud tavalist taskulampi paigaldada... Mul oli vaja midagi funktsionaalsemat. Näiteks heleduse reguleerimisega "madal / keskmine / maksimaalne" ja kuna toiteallikana oli plaanis kasutada liitiumioonakut, oli vaja ka laadimistaseme indikaatorit. Olen Internetis palju näinud sarnased projektid, aga millegipärast need mulle ei sobinud. Näiteks sattusin PWM heleduse kontrollerite projektidele, kuid neil kas polnud laetuse taseme indikaatorit või oli laadimistaseme näidik 1...3 LED-i peal ja mulle ei meeldinud nii vähe infosisu. Noh, tehke seda nii ja ma asusin oma projekti kokku panema. Nii et laadimisindikaatorina võtan 10 LED-i või pigem LED-tulba, nagu see:
Tellisin selle LED “pollari” veebipoest (meie linnas raadiopoode ei ole), seega jõuab kohale alles paari nädala pärast. Selle asemel paigaldasin ajutiselt 10 tavalist LED-i.
Juhtmikrokontrollerina kasutasin ATmega8 (või ATmega328), kuna sellel MK-l on ADC, mille abil korraldasin aku laetuse taseme mõõtmise. Sellel MK-l on ka piisav arv kontakte (ja tahame ühendada koguni 10 LED-i). See mikrokontroller on raadiopoodides levinud, suhteliselt odav - olenevalt poe ahnusest ja korpuse tüübist jääb vahemikku 50...100 rubla.
Seadme tööpõhimõtte mõistmiseks vaatame plokkskeemi:

See artikkel kirjeldab ainult seda, mis puudutab PWM-kontrollerit (plokkskeemi vasak pool), ning LED-draiveri ja LED-i ise valite oma maitse järgi, teile kõige sobivama. ZXSC400 draiver sobib mulle, seega kasutan seda näitena.
PWM-kontroller peab olema ühendatud LED-draiveriga, millel on hämardamise funktsioon (DIM, PWM jne), näiteks ZXSC400. Võite kasutada mis tahes muud sobivat draiverit, kui see toetab PWM-heleduse juhtimist ja toidab sama akut, mis toidab PWM-kontrollerit. Neile, kes ei tea, mis on LED-draiver, selgitan: draiverit on vaja selleks, et LED põleks võrdselt eredalt nii aku laadimisel kui ka tühja aku korral. Teisisõnu hoiab LED-draiver läbi LED-i stabiilse voolu.

Tüüpiline lülitusskeem ZXSC400 LED-draiveri sisselülitamiseks:

Selle vooluahela toide tuleb ühendada meie PWM-regulaatori võimsusega ja regulaatori PWM-väljund tuleb ühendada ZXSC400 draiveri STDN-sisendiga. “STDN” tihvti kasutatakse heleduse reguleerimiseks PWM-signaali abil. Sarnaselt saab PWM-kontrolleri ühendada paljude teiste LED-draiveritega, kuid see on eraldi teema.
Seadme töö algoritm. Toite sisselülitamisel kuvab MK aku laetuse taset 1 sekundi jooksul (10 LED-i LED-skaalal), seejärel LED skaala kustub, MK läheb energiasäästurežiimile ja ootab juhtkäske. Tegin kõik juhtnupud ühele nupule, et rattale vähem juhtmeid tõmmata. Kui hoiate nuppu all kauem kui 1 sekund, lülitub PWM-kontroller sisse ja PWM-väljundisse suunatakse 30% töötsükliga signaal (1/3 LED-i heledusest). Kui vajutate nuppu uuesti üle 1 sekundi, lülitub PWM-kontroller välja ja PWM-väljundisse signaali ei saadeta (0% töötsükkel). Kui vajutate nuppu lühidalt, lülitub heledus 30% - 60% - 100% vahel ja aku laetust kuvatakse 1 sekundiks. Seega üheainsa vajutusega muudetakse LED-i heledust ja pikal vajutamisel lülitatakse LED sisse/välja. PWM-kontrolleri funktsionaalsuse testimiseks ühendasin selle väljundiga tavalise LED-i, kuid kordan veel kord - ainult funktsionaalsuse testimise eesmärgil. Tulevikus ühendan PWM-kontrolleri ZXSC400 draiveriga. Seadme töö on üksikasjalikumalt ja selgemalt näidatud videos (link artikli lõpus).
Järgmine diagramm näitab ka heleduse reguleerimise protsessi:

Mida teha, kui te ei ole nende heledusväärtustega rahul? Näiteks soovite, et see oleks järgmine: 1%, siis 5%, siis 100%. Olen ka selle võimaluse ette näinud. Nüüd saab kasutaja määrata need kolm heleduse väärtust, mida iganes ta soovib! Selleks kirjutasin väikese programmi, mis genereerib soovitud väärtuste põhjal faili EEPROM-i vilkumiseks. Selle faili mikrokontrollerisse vilkudes muutub heledus vastavalt soovitud väärtustele. Lisan programmi akna ekraanipildi:

Kui te EEPROM-faili ei vilgu, jäävad heleduse väärtused vaikeväärtusteks - 30%, 60%, 100%. Õigesti kokkupandud seade ei vaja konfigureerimist. Soovi korral saate oma äranägemise järgi reguleerida ainult minimaalset, keskmist ja maksimaalset heledust. Programm ja kasutusjuhised on artikli lõpus.
Kasutatava aku valimine. Kasutasin selle levimuse ja madala hinna tõttu liitium-ioonakut. Kuid ahelasse panin hüppaja J1, millega saate valida, mida me toiteallikana kasutame.

Kui hüppaja J1 on asendis “1”, kasutatakse ühte liitiumioonakut. Kui hüppaja J1 on asendis “2”, siis kasutatakse kolme tavalist AAA/AA/C/D patareid, mis on ühendatud järjestikku. Jumper J1 on vajalik aku laetuse taseme õigeks kuvamiseks, kuna liitium-ioonaku tööpinge jääb ligikaudu vahemikku 3,3...4,2V ja tavaliste akude puhul on tööpinge ligikaudu 3,0...4,5V. Lisasin artikli lõppu aku pingete tabelid indikaatorinäitudega.
Indikaatori LED-id. LED-tuled, mis näitavad aku laetuse taset, võivad olla ükskõik millised. Nende heledust saate reguleerida väikestes piirides, muutes voolu piirava takisti R1 väärtust. Laadimistaseme kuvamiseks kasutatakse dünaamilist näitu, tänu millele saavutatakse energiasääst, kuna korraga põleb ainult üks LED. Samuti saate vaadata videot aku laetuse taseme näitamise kohta (link artikli lõpus).

Mikrokontroller võib olla kas ATmega8 või ATmega328. Mõlemad mikrokontrollerid ühilduvad kontaktide paigutusega ja erinevad ainult "püsivara" sisu poolest. Kasutasin ATmega328, kuna see MK oli mul laos olemas. Energiatarbimise vähendamiseks toidab mikrokontrolleri sisemine 1 MHz RC ostsillaator. Mikrokontrolleri programm on kirjutatud keskkonnas 4.3.6.61 (või 4.3.9.65).
Ahel kasutab TL431 võrdluspingeallika mikrolülitust. Selle abiga saavutatakse hea täpsus aku pinge mõõtmisel. Toide antakse TL431-le mikrokontrolleri PC1 viigust läbi takisti R3. TL431 toitepinge tekib ainult laadimistaseme näidu ajal. Pärast märgutulede kustumist peatatakse toitepinge, säästes aku energiat. TL431 kiipi võib leida arvutite kasutuskõlbmatutest toiteallikatest, katki laadijad mobiiltelefonidest, kuni pulsiplokid toide sülearvutitest ja erinevatest elektroonikaseadmetest. Ma kasutasin TL431 SOIC-8 paketis (smd versioon), kuid TL431 on tavalisem TO-92 paketis, nii et tegin mitu PCB variatsiooni.
Teave emuleerimise kohta programmis " ". Proteuse projekt ei tööta korralikult. Tänu sellele, et ATmega8 mudel ei ärka puhkerežiimist ja ka piduritega, kuvatakse dünaamiline näit. Kui pärast projekti käivitamist hoiate kohe nuppu all, nii et PWM-kontroller lülitub sisse, siis kõik töötab. Kuid niipea, kui hoiate nuppu uuesti all, et PWM-kontroller välja lülitada, läheb MK magama ega ärka enam (kuni projekt on taaskäivitatud). Ma ei lisa Proteuses projekti. Kes tahab ringi mängida - kirjutage, saadan projekti Proteusele.
Peamised tehnilised omadused:
- Toitepinge, mille juures töö on garanteeritud: 2,8 ... 5 volti
- PWM signaali sagedus: 244 Hz
- 10 LED-i skaalal dünaamiline kuvasagedus: 488 Hz (10 LED-i kohta) või 48,8 Hz (LEDi kohta)
- Tsükli jooksul lülitatavate heledusrežiimide arv: 3 režiimi
- Kasutaja saab muuta iga režiimi heledust: Jah
Allpool saate alla laadida MK ATmega8 püsivara ja ATmega328
Šutov Maxim, Velsk
Radioelementide loetelu
| Määramine | Tüüp | Denominatsioon | Kogus | Märkus | Pood | Minu märkmik | |
|---|---|---|---|---|---|---|---|
| U1 | MK AVR 8-bitine | ATmega8-16PU | 1 | Märkmikusse | |||
| U2 | Võrdluspinge IC | TL431ILP | 1 | Märkmikusse | |||
| Takistid | |||||||
| R1, R2 | Konstantne takisti SMD 1206 | 330 oomi | 2 | Märkmikusse | |||
| R3 | Konstantne takisti SMD 1206 | 1 kOhm | 1 | Märkmikusse | |||
| R4 | Konstantne takisti SMD 1206 | 10 kOhm | 1 | Märkmikusse | |||
| R5 | Konstantne takisti SMD 1206 | 47 kOhm | 1 | Märkmikusse | |||
| Konstantne takisti SMD 1206 | |||||||